ADDRESSING JOINT ACTION CHALLENGES IN HRI: INSIGHTS FROM PSYCHOLOGY AND PHILOSOPHY
From the very beginning, fundamental and multidisciplinary discussions have been at the heart of the project. It has led to an original contribution from psychologists to robotics « Contribution of Developmental Psychology to the Study of Social Interactions: Some Factors in Play, Joint Attention and Joint Action and Implications for Robotics » by Hélène Cochet and Michèle Guidetti(2018).
We have also made public a mirror of the project bibliography: https://www.zotero.org/groups/jointaction4hri-openbiblio and we have conducted a series of workshop on Joint Action (fja.sciencesconf.org).
A discussion has been setup from the beginning of the project between the three teams. It has led to a joint paper entitled « Addressing Joint Action Challenges in HRI: Insights from Psychology and Philosophy »co-authored byall the participants of the project in the three labs. The paper has been accepted and will be published in the following months. The abstract of the paper is the following: The vast expansion of research in human-robot interactions (HRI) these last decades has been accompanied by the design of increasingly skilled robots for engaging in joint actions with humans. However, these advances have encountered significant challenges to ensure fluent interactions and sustain human motivation through the different steps of jointaction. After exploring current literature on joint action in HRI, leading to a more precise definition of these challenges, the present article proposes some perspectives borrowed from psychology and philosophy showing the key role of communication in human interactions. From mutual recognition between individuals to the expression of commitment and social expectations, we argue that communicative cues can facilitate coordination, prediction, and motivation in the context of joint action. The description of several notions thus suggests that some communicative capacities can be implemented in the context of joint action for HRI, leading to an integrated perspective of robotic communication.
DACOBOT: A NEW INSTANCE OF LAAS ROBOTIC ARCHITECTURE FOR HRI
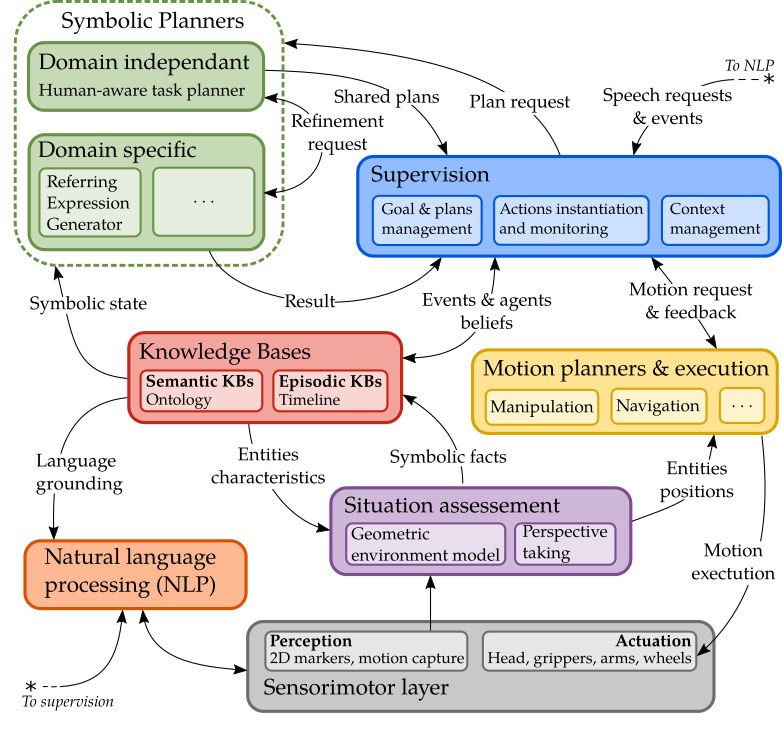
The project, along with the H2020 MuMMER project leads us to implement a new instance of LAAS Robotic Architecture for interaction in the continuity ofour previous work(Lemaignan etal.2017). We pursued this work started in our lab by expanding the componentsfeatures and refining, consolidating the interactions between these components. Thec omponent names and functions of both architectures are the same but most of the implementations are all new and the way they rely on, interact with each other, is as well. All the components of the DACOBOT (Deliberative Architecture for COllaborative roBOT) are designed to be human-aware,making the global system human-aware, which is quite rare.
With this architecture, we focus on a given type of Human-Robot Interaction: collaborative tasks, joint actions. In this context, the human and the robot share a common space and exchange information through multiple modalities (speech, gesture, gaze). The robot should be able to act on its environment, by manipulating objects and navigate among humans. This function is assured by the Motion Planners and Excutors. In order to be aware of its environment, the robot needs perception modalities which are handled by the sensori-motorlayer, it can be cameras, lasers, motion capture, force sensors, etc. To avoid each component having to process the data itself in order to be able to use them, the Situation Assessment, converts them from geometric data to symbolic data. Moreover, it endows the robot’s visual perspective-taking. Then, these data are stored in Knowledge Bases, one for the robot and another for the human. Finally, the heart of the architecture, the decision-making process is located in the Supervisor. In order to make its decisions, the Supervisorrelies on the KBs, the communication through the Natural Language Processing(NLP) and especially the Task Planners. Once the decision made, it controls the robot through the Motion Planners and Executors and the NLP.
This part of the work have benefit from the work of Amandine Mayima and Kathleen Belhassein as well as Guillaume Sarthou, Guilhem Buisan, Phani Teja, Yoan Sallami, Jules Waldhart in the framework of the H2020 MuMMER project
THE DIRECTOR TASK: A BENCHMARK TASK FOR HRI

We proposed and implemented The Director Task: a Psychology-Inspired Task to Assess Cognitive andInteractive Robot Architectures.
Assessing robotic architecture for Human-Robot Interaction can be challenging due to the number of features a robot has to endow to perform an acceptable interaction. While everyday-inspired tasks are interesting as reflecting a realistic use of such robots, they often contain a lot of unknown and uncontrolled conditions and specific robot behavior can be hard to test. With this task, we propose a new psychology-inspired task, gathering perspective-taking, planning, knowledge representation with theory of mind, manipulation, and communication. Along with a precise description of the task allowing its replication, we present a cognitive robot architecture able to perform it in its nominal cases. We finally suggest some challenges and evaluations for the Human-Robot Interaction research community, all derived from this easy-to-replicate task.This work has been appreciated by the communauty since it has been selected in the Finalists for Best Paper Award at RO-MAN 2021. This part of the work have benefit from the work of Amandine Mayima and Kathleen Belhassein as well as Guillaume Sarthou and Guilhem Buisan (and Yannick Riou for the technical aspects).
COMMITMENTS IN HRI: THE CREDIBILITY PROBLEM
An important tradition in philosophy holds that in order to successfully perform a joint action, the participants must be capable of establishing commitments on joint goals and shared plans. We have studied how commitments could facilitate coordination and cooperation by stabilizing expectations, reducing the uncertainty of the interaction, providing reasons to cooperate or improving action coordination in a human-robot settings.
However, to serve these functions must be credible in the first place. In the paper « Joint actions, commitments and the need to belong », Fernandez-Castro and Pacherie have offered an account of what motivates humans to abide by their commitments. We first argue that while reputation management and social emotions certainly playa role in motivating us to act as committed, there are both theoretical and empirical reasons to think that neither captures the most basic motivational force at work in sustaining commitments. We propose instead that the need to belong, i.e., the need toaffiliate with others and form long-lasting bonds with them, is what primarily motivates us to interact and engage with those around us and act so as to preserve and reinforce the bonds we have forged with them.
In addition, in a submitted paper on Commitments and the sense of Joint Agency, Fernandez-Castro and Pacherie have explored three complementary ways in which commitments may shape the sense of joint agency and its main characteristics. First, they can generate reliable higher-level expectations about the behavior of co-agents, which would positively impact our sense ofjoint agency to the extent that these expectations are met. Second, they enable the recipient to demand that the author behaves in accordance with the commitments and the expectations they generate and to sanction, reprimand or express dissatisfaction when that is not the case, allowing the recipient to exert more control over the joint action in general. Finally, expressing commitments implicitly or explicitly can modify the affective dimension of collective action, and therefore, the way we experience it.
Consideration of the crucial role of commitments in human-human cooperative interaction suggests that social robotics should endow robots with similar competences for commitment management in order to achieve the objective of performing joint tasks in human-robot interactions. In this poster and in a submitted paper, Fernandez-Castro and Clodic considered these two philosophical approaches to commitments. These approaches, we argued, emphasize different behavioural and cognitive aspects of commitments that give roboticists a way to give meaning to monitoringand pro-active signalling in joint action with human partners. While we have not been able to go to an implementation, we have identified ways in which commitments (and esp. expectations) management could benefit a robotic architecture for joint action.
In a joint paper entitled « What does it take to be a social agent? », Fernandez-Castro, Hakli and Clodic discuss ways in which the commitment credibility problem may be solved in the context of human-robot interactions.After first arguing in favor of the fundamental role of the notion of commitment in mutual recognition, we show how the attribution and maintenance of commitment requires fundamental affective states such as social emotions or the prosocial motivation of the need to belong. Finally, we survey three proposals on how social robotics could implement an architecture of commitment by addressing the centrality of these emotions and exposing their weaknesses and strengths.